Given below is a simplified block diagram of a feedforward control system.
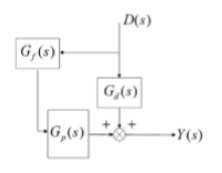
The transfer function of the process is $G_{p}=\frac{5}{s+1}$ and the disturbance transfer function is $G_{d}=\frac{5}{s^{2}+2s+1}$. The transfer function of the $PERFECT$ feedforward controller, $G_{f}(s)$ is
- $\frac{-5}{\left ( s+1 \right )^{3}}$
- $\frac{-5}{\left ( s+1 \right )}$
- $\frac{-1}{5\left ( s+1 \right )}$
- $-5\left ( s+1 \right )$